Basic tips
1. Light sensor reading
The light should shine half on the black and half on the right when taking the reading.

2. Movement
1 rotation = 360 degrees = 17.2 cm
(Medium wheel diameter is 5.5 cm >>> R=2.75 cm)
1 rotation = 2πR = 2π x 2.75 = 17.2 cm
3. A common problem with JC program
The robot stops when getting to a junction - MUST move a bit forward (70 degrees); otherwise, get stuck on the junction itself.
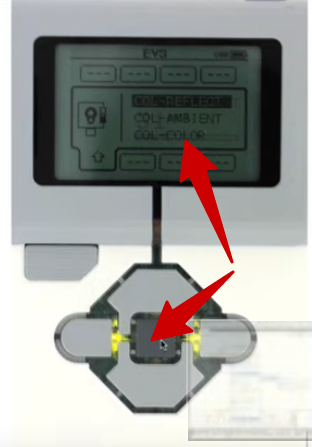
4. Taking a sensor reading


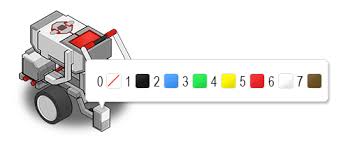
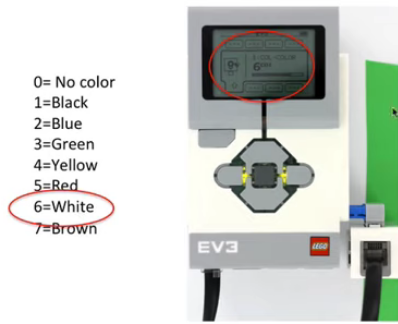
5. Color sensor
Each color read has a number, so we know which object was collected.
Last modified: Friday, 7 August 2020, 3:11 PM